Presseinformation
Ausfallsicheres Lenken und Bremsen beim automatisierten Fahren
Das vom BMBF geförderte Projekt AutoKonf präsentiert ein innovatives Konzept für die E/E-Architektur hochautomatisierter Fahrzeuge.
Das Konsortium AutoKonf präsentierte kürzlich eine neue Lösung, um sicherheitskritische Funktionen für das hochautomatisierte Fahren wirtschaftlich und technisch effizienter als bisher in die E/E-Architektur zu integrieren. Ziel des öffentlich geförderten Projekts war es, Brems- und Lenksystem fehlertolerant auszulegen und gleichzeitig eine Doppelung aller Komponenten zu vermeiden. Mithilfe eines rekonfigurierbaren Steuergeräte-Verbundes ist das künftig möglich: Kosten sowie Bauraum werden gespart.
E/E-Architektur: Reduzierung der Komponenten
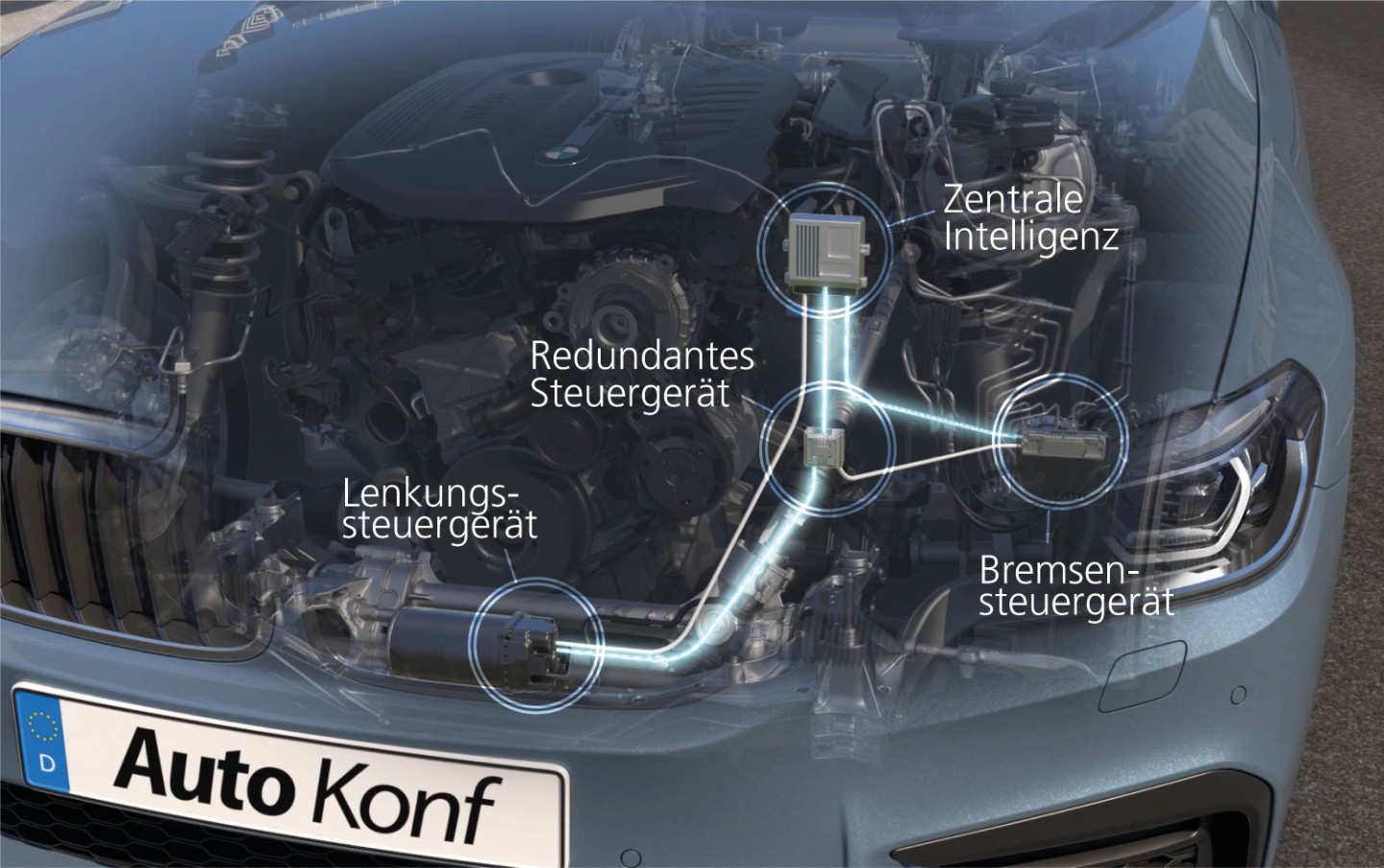
Beim Wandel von störungssicheren hin zu fehlertoleranten Komponenten beim hochautomatisierten Fahren sind Veränderungen in der gesamten E/E-Architektur unvermeidbar. Für Autonomiestufe 4 müssen die zum Fahrbetrieb notwendigen Komponenten ausfallsicher ausgelegt werden, da der Fahrer im Fehlerfall nicht immer sofort die Kontrolle übernehmen kann. Bisherige Ansätze verdoppeln die Steuergeräte für Bremse und Lenkung. Fällt eines davon aus, etwa das Lenkungs-Steuergerät, dann steht durch die redundante Komponente die Lenkfunktion weiterhin zur Verfügung. Diese Verdopplung der Bauteile ist technisch und wirtschaftlich nicht immer optimal. Die AutoKonf-Partner entwickelten deshalb gemeinsam ein innovatives Architekturkonzept, das an Stelle von zwei Redundanz-Steuergeräten nur eines vorsieht. Fällt das primäre Steuergerät aus, sei es die Lenkung oder die Bremse, übernimmt das redundante Steuergerät die ausgefallene Funktion unmittelbar.
Das Projekt „AutoKonf“
Im Förderprojekt AutoKonf wurden automatisch rekonfigurierbare Aktoriksteuerungen für ausfallsichere automatisierte Fahrfunktionen entwickelt. Fünf deutsche Unternehmen schlossen sich in einer Kooperation zusammen: Die BMW Group Forschung, Neue Technologien, Innovationen übernahm die Entwicklung eines verlässlichen Vernetzungskonzepts, die Fraunhofer EMFT entwickelte die Umschalteinheit, HELLA GmbH & Co. KGaA übernahm die Entwicklung des Chassis-Steuergeräts, Intedis GmbH & Co. KG war für die Ableitung der Komponentenanforderungen, den Musteraufbau und die abschließende Systemvalidierung sowie die Projektleitung zuständig und ITK Engineering GmbH erstellte die Systemanforderungen und die Systemarchitektur inklusive Sicherheitskonzept.
Das Projekt dauerte vom 01.10.2016 bis 30.09.2019 und wurde vom Bundesministerium für Bildung und Forschung gefördert.
Letzte Änderung: